
本期精选7项人工智能与机器人领域的技术成果进行推荐,感兴趣的企业朋友可以长按识别文末二维码,进行咨询对接。
自然场景视觉感知与理解是人工智能的前沿热点,其主要任务是对场景中的视觉要素进行认知,进而推断出其中包含的场景语义。
IMAGINE实验室近年来相继从场景构成分析、场景内容推理、场景结构建模等角度对这一问题展开了系统研究,着重探索了融合先验建模与深度学习的自然场景视觉理解这一问题。
相关成果在工业生产、安全监控等多个行业中进行了推广,先后获中国发明专利授权20余项,部分专利成果已在国家级高新技术企业和江苏省高新技术企业得到应用转化。
大数据具有规模大、种类多、产生速度快、有价值数据密度低等特点。对大数据信息分析具有重要意义,也是目前研究的热点,其主要任务是利用数据分析的方法从大数据中获取有价值信息。
IMAGINE实验室近年来结合深度学习前沿技术和传统数据分析方法进行数据分析和预测,并在海关大数据分析项目和国网电力冰风灾害预测项目中进行应用。
传统的海关税收监管主要是以手工操作为基础,这种方式效率低下。随着当前国际贸易和跨境电子商务的快速发展,海关税收监管业务正面临商品种类繁多、贸易形式复杂多样等多重困难。同时,随着进出口业务的快速增加,对征税速度、准确性以及风险把控能力等也提出了更高的要求。
为了解决海关税收监管中存在的问题,形成“政、产、学、研、用”协同创新成果,该大学实验室结合海关总署关税司、南京海关完成了商品特征识别、异常模式分析、多来源信息提取和海关全周期大数据分析四个特色功能模块。
该项目中,我们利用模式识别与文档分析技术,实现了对于海关随附单据的特定关键信息提取;通过提取数据及对数据进行一致性检验,实现了单单相符;通过对商品进行聚类和分类分析,完成对贸易数据的风险分析;
利用统计分析和数据挖掘方法和组合多维度信息,实现了贸易异常数据检测;使用可视化的方法,为海关提取到大量异常数据;完成海关数据多属性可视化分析,为海关全周期实时监管提供了技术保障。
项目采用了自动分词、数据标定、非监督学习、随附单据矢量化识别、知识图谱构建等多种技术手段。
针对部分应用中数据量偏少的问题,与多所单位合作开展了小样本学习和输电线典型冰风灾害预测研究。
系统分析小样本条件下的自动特征提取、特征筛选、推理总结,以及小样本条件下的机器学习和数学预测模型,具有较强的针对性和实际应用价值,有助于提高对典型输电线路冰风灾害预测的准确率,从而降低典型输电线路冰风灾害导致经济损失发生的概率,最终提升人工智能预测系统产生的经济效益与价值。
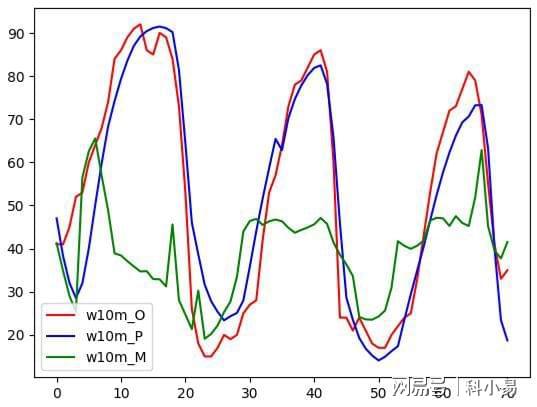
同时,该系统提升了电网公司管理水平,改被动应急为主动防御,创新电网防灾减灾工作方式,对电网公司具有重要意义。该系统通过建立多种模型,实现对输电线路灾害风险评估和辅助决策,对灾害影响范围、程度等进行深入分析,为输电网防灾减灾工作提供应急处置建议,实现增强企业的竞争能力,提高企业的综合效益,达到输电线路安全、经济、稳定运行的目标。
图书馆中频繁的图书取阅与上架容易导致图书错架摆放。一旦错架 , 读者就很难找到想要的书籍。据统计 , 仅中国图书馆的藏书总量就超过34.3亿册 , 其中平均错架率高达7.5% , 即有2.57亿册图书难以找到 , 图书资源浪费严重。

针对这些不足之处,该大学计算机软件新技术国家重点实验室联合该大学图书馆,在物联网、人工智能与机器人融合方面开展大量系统深入的研究工作,自主研发全球首台RFID图书盘点机器人,实现了全自动化图书盘点。
RFID感知:随机器人移动扫描,定位图书内嵌的RFID芯片,解决图书错架问题;

RFID扫描范围远,其他书架以及上下层的图书会干扰扫描结果, 这大大增加了精准图书定位的难度。

RFID扫描设备能够同时覆盖数百枚图书标签,标签数据采样率极低,提升了精准图书定位的门槛。
图书盘点效率每小时超过 20,000册,漏读率低于1%,定位精度高达 98% ,实现了厘米级图书定位。
团队已有12项中国专利被授权,并申请了4项国际专利,并在日内瓦国际发明展上获得了最高奖项。
本项目所设计的腰部助力外骨骼机器人以较轻的整体质量为使用者腰部提供作业时稳定助力,能够有效减轻使用者腰部负担,辅助使用者轻松安全地完成作业过程。产品基于微动的多模融合运动意图识别技术、重复复杂运动的自适应迭代学习算法等多项先进技术,选用轻质结构材质,高性能驱动部件及高性能电池组。
2、舒适的绑缚结构:采用“X”形结构,有效分散设备自重,提升使用舒适度;
4、精确快速的意图识别技术:采用基于微动的多模融合运动意图识别技术、重复复杂运动的自适应迭代学习算法。
从全球范围来看,老龄化逐步变成一个突出的问题,腰部助力外骨骼机器人也将渐渐成为各大企业的必备工具。腰部助力外骨骼机器人产品作为一种面向个人及企业法人的解决方案,在未来几年的发展里,助老市场会随之扩大,此外在物流、建筑、制造等行业中企业为了解决员工身体负担所带来的一系列问题,会不断寻求解决方案以使得最终为企业带来经济效益,该方面的需求也会越来越多,伴随着此类个人用户及企业法人用户群体的增加,出力辅助外骨骼机器人将会将会在助老、物流、建筑、制造、医疗、农林等各大行业普及。
本项目将围绕腰部助力外骨骼机器人结构、控制算法及意图识别三个方向同步开展,需要获得项目研发资金的支持。目前生产条件已经具备,将联合相关有限公司进行产业转化,实现产业化落地。
本项目主要从机器人三要素:交互感知、认知决策和规划执行的角度研究了下肢外骨骼机器人的多模融合控制策略。在下肢外骨骼机器人机构创成和人-机器-环境感知的研究基础上,重点攻关了基于脑肌电和物理信号的多模态运动意图识别和自主步态规划科学难题,实现了、提高了穿戴的安全性、稳定性和舒适性。
下肢康复外骨骼机器人主要应用于下肢肢体运动神经康复和助力领域,具体使用对象包括但不限于:
2、因老年化而导致的下肢肌无力患者。下肢康复外骨骼的应用可以使得下肢行动不便的人群重新站立并获得行走能力,避免其因长期卧床而导致肌肉萎缩、痉挛等一系列问题,从而帮助其自信、自主地生活。
目前世界上存在着大量肢体运动障碍的特殊人群,其主要表现为由脊髓损伤、中风等引起的截瘫、偏瘫等症状。根据残联统计数据,我国脊髓损伤者约100万,并以每年1万人的速度在递增;中风患者每年新增200余万,其中近2/3受困于偏瘫等后遗症。下肢外骨骼机器人能显著提高下肢失能人群的运动能力和生活质量,其应用的市场前景广阔。
本项目主要从机器人三要素:交互感知、认知决策和规划执行的角度研究了下肢外骨;控制策略,需要进一步进行康复训练实验和获得项目研发资金支持。目前已经同深圳市多机构和医院建立合作关系,连续参展三届高交会并获优秀产品奖,被央视等媒体报导,获广泛关注,有望实现产业落地。
本项目基于人体运动学,机器人学、神经网络、柔性传感技术以及控制系统等多学科、技术融合的基础上,创新性的提出来的一种基于柔性传动,柔性感知和桑性人机交互的助力系统,实现为穿戴者提供高效助力、并且设计了多款根据不同需求、适应不同场景的轻装下肢助力机器人。
1、系统结构的轻量化设计:最大程度简化系统结构,保证系统助力有效性的同时大幅度降低由系统自重给穿戴者带来的新陈代谢消耗;
2、系统穿戴安装的便捷性:柔性绑缚以及柔性人机交互的特性让穿戴者更加简单便利的穿戴安装系统;


柔性外骨骼机器人可以主要应用于军用/医用/民用等领域。具体包括但不限于:
1、军用:为士兵在边境巡逻、负重行军等活动中为士兵进行助力,减少士兵的运动损伤,提升士兵的运动机能以及续航能力:
2、医用:为患中风等疾病导致下肢肌肉功能受损的患者在康复训练的过程中提供助力,从而提高康复训练的效果;
3、民用:针对老年人下肢运动能力大幅度降低或者是各行业中容易受到运动损伤的高危人群在日常生活和工作中提供助力,从而达到运动能力增强以及保护机能不受损伤的目的。
随着现代化战争的影响,士兵所用配备的装备增加,导致士兵在行军、巡逻等日常军事活动中所要负重的增加,士兵的续航能力降低以及受运动损伤的概率大大提高。同时在医疗行业和服务行业中,针对下肢肌肉损伤患者的康复训练以及对从事物流业等对身体机能有损害风险的就业人员保护中,柔性外骨骼机器人都有良好的发展前景,在军事、医疗和民用等领域中都是未来可期。
本项目将围绕柔性驱动设计、柔性感知算法开发和桑性人机协调研究三个方向同步开展,需要获得项目研发资金的支持。目前生产条件已经基本具备,将联合产业界进行产业转化,实现产业化落地。
2、检测效率高。单次检测17米高活塞杆时间不超过2小时,而传统搭脚手架检测一次需20天。
3、锈斑缺陷定位精度高。采用激光传感器和高精度伺服控制,精准定位锈斑位置。同时可搭载工业相机、超声探伤、涡流探伤等设备。
3、搭载2D和3D两款相机,可识别缺陷大小和缺陷深度。2D线D激光相机深度分辨率0.006mm;
4、机器人可搭载超声涡流等其它无损探伤设备,也可搭载清洗设备,功能扩展性好。
可应用于水电大坝活塞杆、石油化工管道、建筑等行业管状物表面和内部缺陷检测、清洗等领域。
电站内部圆柱活塞杆检测目前以人工搭建脚手架检测为主,检测单根17米活塞杆工期长约20天,检测成本15万,电站内部有数十个活塞杆,维修检测的综合成本较高。研制的机器人可代替人工检测,缩短检测时间,降低检测成本,每年可以节省数十万至上百万的检修费用。该机器人还可以检修其他管状物的探伤,例如石化管道裂缝等检测,市场前景广阔。
本项目具有机器人技术、缺陷视觉检测等技术支撑,拥有以教授、工程师组成的专业团队作为人才支撑。机器人主要零部件便于采购和加工,生产要求不高。本项目将整合优势资源,与相关水电站合作,具有完备的要素投入,可以最终实现产业化。
本项目在无人机的基础上搭载基于红外热成像相机,完成故障光伏组件的排查,可以轻松应对各种企业楼顶、鱼塘、高山斜坡等光伏组件的巡检,智能无人机具备机动性高,不受地形限制可以自由移动的特性,可携带的任务设备多种多样。项目以大疆M100为载体,开发出航迹规划地面站,巡检人员能够以友好的操作画面进行无人机巡检航迹的规划,并且完成无人机的飞行姿态及相机参数等的设置;基于图像处理的故障实时预警,及时排除故障组件;以及依靠高清电子地图的故障点定位,给巡检人员最清晰明了的故障组件更换位置。


无人机:轴距:650mm;最大起飞重量:3600g;悬停精度:垂直0.5m,水平2.5m;最大上升速度:5m;最大下降速度:4m;最大水平飞行速度:22m/s(ATTI模式,无风),17m/s(GPS模式,无风);最 大旋转角速度:俯仰轴:300°/s,航向轴:150°/s;最大可承受风速:10m/s;工作环境温度:-10°C至40°C。 红外热成像相机结合本项目算法,能够实时监测出故障点,并回传图像数据。控制平台能够通过相机返回数据实时做出反应,调整无人机姿态。
通过本项目算法与红外图像数据、控制平台以及数据处理系统之间的连通,能够实现从拍摄到检测,再到位置确定的全自动化,极大的减少了工作人员的任务量。平台操作简单,巡检效率高,巡检误差小,巡检周期短,故障点定位清晰,能够应对各种复杂的空况环境。
该光伏巡检无人机主要应用在大范围光伏太阳能板阵列中,实现对故障光伏板的检测,并反馈故障位置。
我国已经成为世界上最大的光伏制造国,而且伴随着可持续发展的国家战略,未来我国在太阳能利用方面还会继续加大力度,可以预见大规模太阳能阵列市场在未来还会有极大的发展。而人工巡检光伏板费时费力,结合无人机能够极大的提高巡检效率,节省人工巡检的巨额成本。而且巡检效率的提升也在一定程度上能更好的预防事故发生,这种无人机巡检方式必能引起越来越多光伏发电厂的关注,形成大规模市场需求。
我国已经成为世界上最大的光伏制造国,而且伴随着可持续发展的国家战略,未来我国在太阳能利用方面还会继续加大力度,可以预见大规模太阳能阵列市场在未来还会有极大的发展。而人工巡检光伏板费时费力,结合无人机能够极大的提高巡检效率,节省人工巡检的巨额成本。而且巡检效率的提升也在一定程度上能更好的预防事故发生,这种无人机巡检方式必能引起越来越多光伏发电厂的关注,形成大规模市场需求。